


1、打开RobotStudio软件。
2、点击新建“空工作站”。
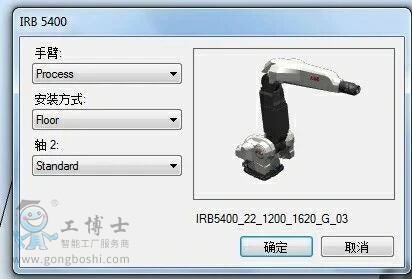
3、从“机器人模型库”导入机器人,从“导入模型库”导入雾化器。

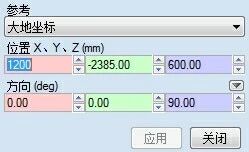
4、在“布局”中右键点击机器人,选择“设定位置”。输入现场机器人位置数据。
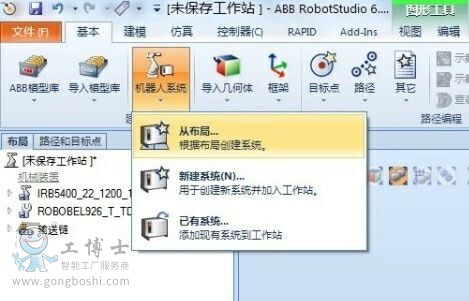
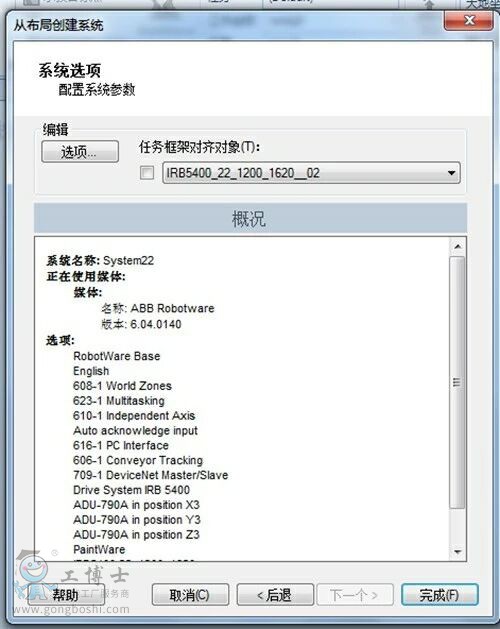
5、在“机器人系统”中选择“从布局”创建系统。选择Robotware版本。点击两个“下一个”到达下图位置。
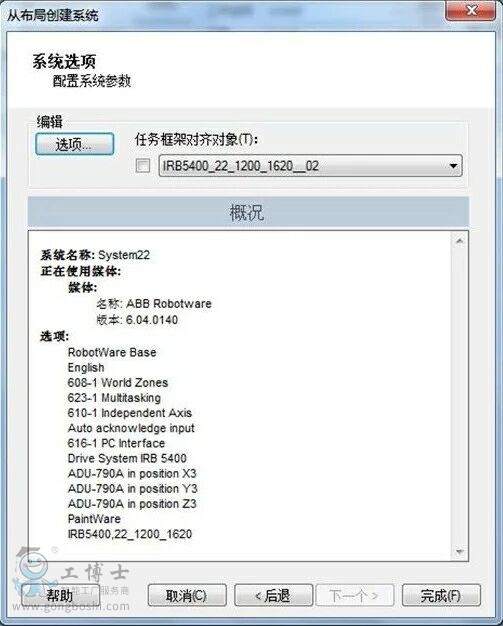
点击“选项”。
点击“MotionCoordination”
勾选“606-1conveyor Tracking”
选择“ConveyorTracking on PIB”
点击“确定”

点击“完成”。
更多点击ABB机器人
