


ABB机器人基本运动指令
ABB机器人在工业现场应用非常广泛,本节分享基本运动指令-MoveL/MoveJ/MoveC/MoveAbsJ用法,基本运动指令函数Offs()、函数RelTool()的用法及其基本规则,具体如下:
1.基本运动指令MoveL/MoveL/MoveC讲解
语句:MoveL p1, v100, z10, tool1;
其中,MoveL表示机器人直线运动指令;MoveJ表示机器人转轴运动指令;MoveC表示机器人圆周运动指令
p1表示机器人将要去的目标位置,数据类型是 robotarget;
v100表示机器人的运行速度,单位:是mm/s,数据类型是speeddata;
z10表示机器人的转弯区尺寸,单位是mm,数据类型是zonedata;
tool1表示机器人的工具中心点 (即经常所说的TCP ),数据类型是 tooldata;
2.转轴运动指令MoveAbsJ讲解
语句:MoveAbsJ jpos1, v100, z10, tool1;
其中,MoveAbsJ表示机器人轴运动指令;
jpos1表示机器人将要去的目标位置,数据类型为jointtarget;
v100表示机器人的运行速度,单位是 mm/s,数据类型是speeddata;
z10表示机器人的转弯区尺寸,单位是mm,数据类型是zonedata;
tool1表示机器人的工具中心点 (即经常所说的TCP ),数据类型是 tooldata;
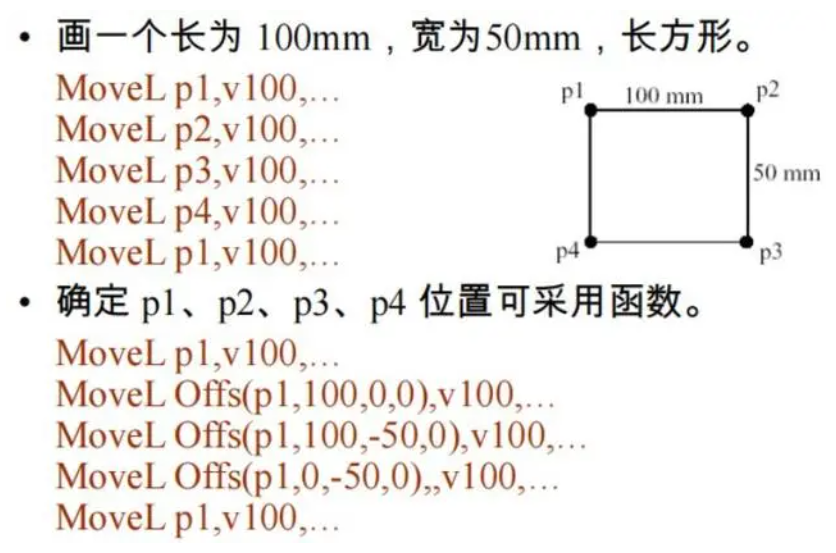
3.基本运动指令函数Offs()的讲解
语句:MoveL Offs(p1,100,50,0), v100,……
其中,MoveL表示机器人直线运动指令;
Offs(p1,100,50,0)代表一个距离p1点,X轴方向上偏差量为100mm,Y轴方向上偏差量为50mm,Z轴方向上偏差量为0的点;
注意:函数 Offs() 座标方向与机器人Wobj座标系一致;
4.基本运动指令函数RelTool()的讲解
语句:MoveL RelTool(p1,100,50,0\Rx:=30 \Ry:=-60\Rz:=45), v100,……
其中,RelTool(p1,100,50,0\Rx:=30\Ry:=-60 \Rz:=45) 代表一个距离p1点X轴偏差量为100mm,Y轴偏差量为50mm,Z轴偏差量为0,X轴偏差角度为30度,Y 轴偏差角度为-60度,Z轴偏差角度为45度的点;
注意:函数 RelTool()座标方向与机器工具Tool座标系一致。
下面就是一个案例,供参考:

文章来源网络,如有侵权请联系删除
